5.vm-storage基础结构
- 整个组件从逻辑上要分为索引部分和数据部分来分开看
- 写入上是先索引再数据
- 查询上也是先索引再数据
- 从程序运行的视角,可以分为内存对象结构部分和磁盘结构部分
- 磁盘结构是目录结构和文件结构,是数据持久化后的静态的呈现
- 内存对象结构是各种对象的关联及其层次结构,是运行期间协调的动态的呈现
- 从层级上看,磁盘结构和内存结构几乎是一致的。
5.1 索引结构
一句话总结索引的结构如下:
- 整个索引可以看成一个排好序的巨大的 string 类型的数组
- 把这个巨大的 string 数组分成如下的层级,分而治之:
- 表:分为 prev 和 curr 两个表,分别存储两个 retention(存储时间期限) 的数据
- part: 每个 part 会存储到一个独立的 part 文件夹
- Block 组:包含多个 block
- Block: 包含多个 item
- Item: 这个巨大的 string 数组中的一条 string
- 把这个巨大的 string 数组分成如下的层级,分而治之:
每条索引字符串的第一个字节用 0-7 的一个数值来代表索引的类型:
- 索引0:metricName -> tsid
- 索引1:tag -> metric ID
- 索引2:metric ID -> tsid
- 索引3:metricID -> metricName
- 索引4:deleted metric ID 1, deleted metric ID 2....
- 索引5:date -> metric ID list (可以根据此索引知道:某一天有没有数据)
- 索引6:date + tag -> metric ID list (可以根据此索引知道:某一天的某个 tag 有没有数据)
- 索引7:date + metricName -> tsid list
每条索引的第二到第九字节,用于存储 tenant ID,这样就可以从逻辑上把不同的租户的数据隔离开
因为整个索引是个巨大的排好序的字符串数组,所以从索引中查询数据的方式就是前缀匹配的二分查找
- 先查询 curr table,找不到再查询 prev table
- 通过 part header 的 first item 来在多个 part 之间做二分查找,定位到数据所在的 part
- 通过 block header 的 first item 来在多个 block 之间做二分查找,定位到数据所在的 block
- 如果block数据不在内存,会把 block 加载到内存,形成一个 inMemoryPart
- inMemoryPart 可以认为是一个完整的排好序的字符串数组,可以在 inMemoryPart 内通过前缀匹配 + 二分查找来找到记录
通过索引找到每条 metric 对应的 metric ID 后,再都数据区域去查询对应的 metrics 的 data point 数据。
因为数据都是前缀匹配,所以很多相同类型的索引前缀都是相同的。数据写入磁盘前,会提取公共的前缀,然后存储数据之间非公共的部分。
5.2 磁盘目录结构
这篇文章对目录结构有很好的介绍: 大铁憨(胡建洪):浅析下开源时序数据库VictoriaMetrics的存储机制
可以通过vm-storage的命令行参数
-storageDataPath来指定存储文件的目录数据根目录:
- cache目录
- 把fastcache中的key-value缓存数据,存储到文件中
- 进程重启之后,从cache文件加载数据
- 从而减少进程重启后带来的查询效率降低的影响
- 每种cache类型一个子文件夹
- data目录
- 存储tsid, timestamp, value三种数据
- indexdb目录
- 存储metric数据
- 存储各种索引的数据
- snapshots目录
- 备份的时候,通过硬链接(inode上加引用计数)把各个数据文件放在此目录下。备份完成后再删除。
- flock.lock 文件锁对应的文件
- cache目录
5.2.1 indexdb目录
indexdb包含每个索引分区的文件夹
- 以 time.Now().UnixNano() 值为起点,递增后,转换为十六进制字符串,以此作为文件夹的名称
- eg: 16C962219904346E
- 以每个
-retentionPeriod参数为周期进行切换,默认是31天 - 只保留最近的两个分区,默认的retentionPeriod是31天的话,最多支持62天的metric查询。
- 以 time.Now().UnixNano() 值为起点,递增后,转换为十六进制字符串,以此作为文件夹的名称
indexdb分区文件夹
- 包含多个part文件夹
- mem table和inmemoryPart的数据达到一定大小后,写入成为一个新的part
- 小的part会不断合并为大的part
- tmp文件夹
- 写入part到磁盘的时候,先写到这个临时文件夹,完成后再mv到对应目录
- merge过程中的文件也会先写到这个磁盘
- txn文件夹
- 小part合成大part后,需要删除多个小part。删除小part前先把文件名写入这个文件夹,防止突然断电丢失大量数据。
- flock.lock文件锁对应的文件
- 包含多个part文件夹
part目录:
- 包含以下文件:
- metadata.json: 整个part的概要信息
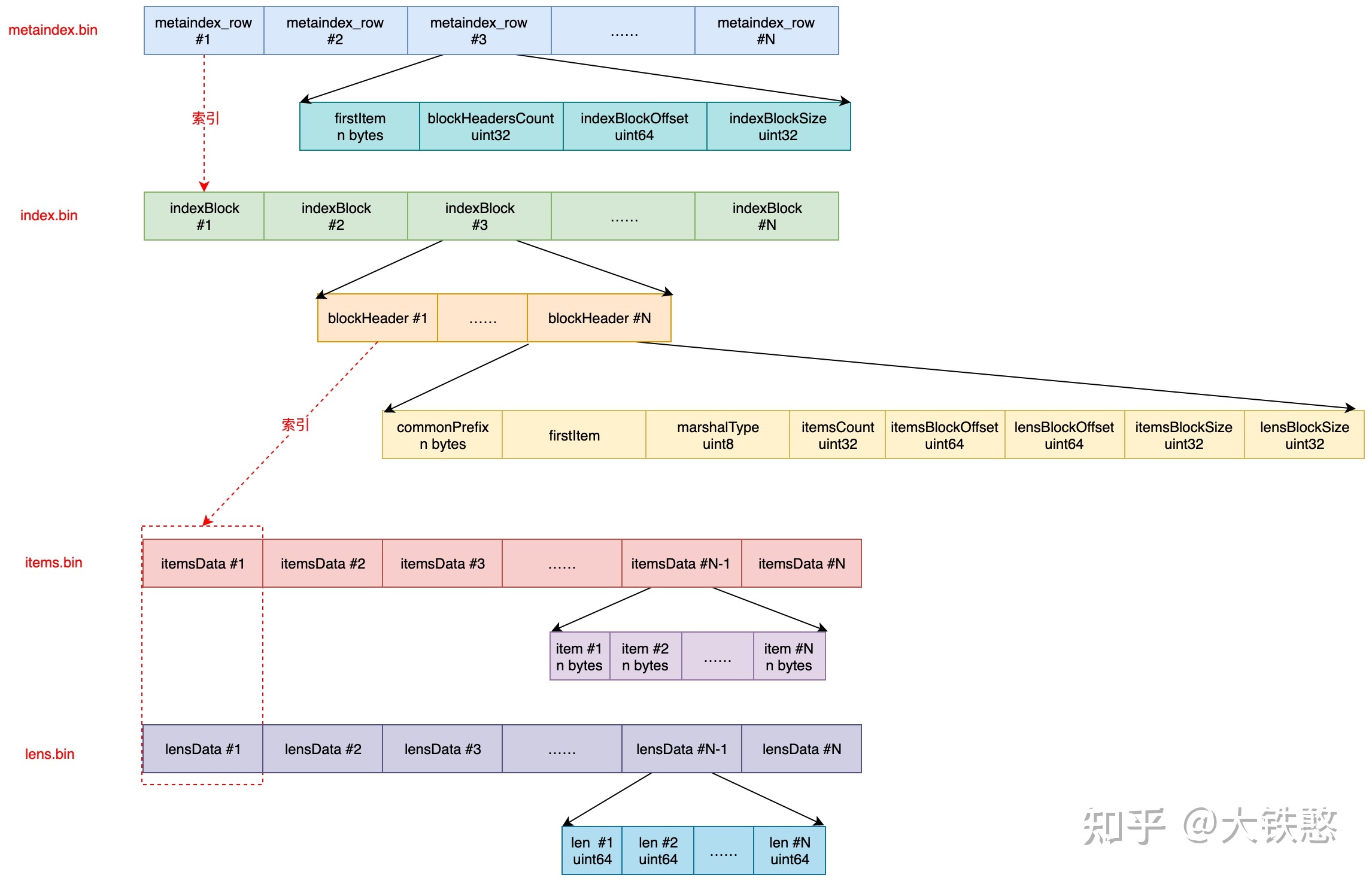
- metaindex.bin: indexBlock的元信息
- index.bin: 包含多个indexBlock信息
- items.bin: 包含多个block
- lens.bin: 包含每个block中每个item的长度信息
5.2.2 data目录
data目录包含big/small两个目录。这两个目录在这一级不太合理,其实是为了区分part的big和small。
big/small目录下面是partition目录。
partition目录
- 每个自然月一个partition目录,命名方式为
${YYYY}_${MM}, eg: 2022_03 - 完全超出
retentionPeriod时间范围的partition会被删除 - 每个partition目录下包含多个part目录
- 包含tmp目录: 与indexdb的目录等同
- 包含txn目录: 与indexdb的目录等同
- 每个自然月一个partition目录,命名方式为
part目录
- 目录的格式为:
${rowsCount}_${blocksCount}_${minTime}_${maxTime}_${partIndex}- eg: 1741878_1741878_20220308032400.000_20220308032430.000_16D818AF14C88E1C
- part目录包含以下文件:
- metaindex.bin: indexRow的元数据信息
- index.bin: 多个indexRow的信息
- timestamps.bin: timestamp的数据
- values.bin: value的数据
- 目录的格式为:
5.3 文件结构
文件都只在part目录下。
5.3.1 索引part
此处引用胡建洪画的图:
5.3.1.1 metadata.json文件
metadata.json描述整个part的汇总信息,解析后对应这这个结构:
// partHeader represents part header.
type partHeader struct {
// RowsCount is the total number of rows in the part.
RowsCount uint64
// BlocksCount is the total number of blocks in the part.
BlocksCount uint64
// MinTimestamp is the minimum timestamp in the part.
MinTimestamp int64
// MaxTimestamp is the maximum timestamp in the part.
MaxTimestamp int64
// MinDedupInterval is minimal dedup interval in milliseconds across all the blocks in the part.
MinDedupInterval int64
}
5.3.1.2 metaindex.bin文件
metaindex.bin存储所有blockIndex的信息。
- 整个文件使用ZSTD压缩算法进行压缩
- 数据由连续的多个metaindexRow对象构成
// metaindexRow describes a block of blockHeaders aka index block.
type metaindexRow struct {
// First item in the first block.
// It is used for fast lookup of the required index block.
firstItem []byte // 第一条索引的原始内容
// The number of blockHeaders the block contains.
blockHeadersCount uint32
// The offset of the block in the index file.
indexBlockOffset uint64 // index.bin 文件中的偏移量,同时还会作为fastcache中的key来使用
// The size of the block in the index file.
indexBlockSize uint32 // 块的字节数
}
- metaindexRow的信息可以通过index.bin文件加载为indexBlock对象
- metaindexRow之间通过firstItem字段进行排序
5.3.1.3 index.bin文件
index.bin包含所有block的信息。
- index.bin一般通过内存映射文件的方式打开
- Index.bin中包含连续的多个indexBlock
- 每个indexBlock使用ZSTD算法压缩
- indexBlock包含blockHeader的数组
- blockHeader对象的内容为:
type blockHeader struct {
// common prefix for all the items in the block.
commonPrefix []byte // block内的所有索引的最大公共前缀
// The first item.
firstItem []byte // 第一个索引的内容
// Marshal type used for block compression.
marshalType marshalType //是否使用ZSTD压缩。很小的块是不压缩的
// The number of items in the block, excluding the first item.
itemsCount uint32 // 存在多少个索引
// The offset of the items block.
itemsBlockOffset uint64 // 在 items.bin 中的偏移量
// The offset of the lens block.
lensBlockOffset uint64 // 在 lens.bin 中的偏移量
// The size of the items block.
itemsBlockSize uint32 // 在 items.bin 中的长度
// The size of the lens block.
lensBlockSize uint32 // 在 lens.bin 中的长度
}
- 同样,多个blockHeader之间使用firstItem字段进行排序
5.3.1.4 items.bin与lens.bin
- 通过blockHeader中lensBlockOffset和lensBlockSize两个字段,索引到lens.bin中的内容
- 先做ZSTD解压缩
- lens.bin中包含两种长度
- 在items.bin中存储的数据的实际长度
- 当前这条数据,相比前一条数据所拥有的公共前缀的长度
- 通过blockHeader中itemsBlockOffset和itemsBlockSize两个字段,索引到items.bin中的内容
- 先做ZSTD解压缩
- 根据lens.bin中的真实长度,读出每条item的数据
- 根据与前一条数据的公共前缀长度,在前一条数据的基础上,拼接上公共前缀
- 最后,根据blockHeader中的commonPrefix拼装出完整内容
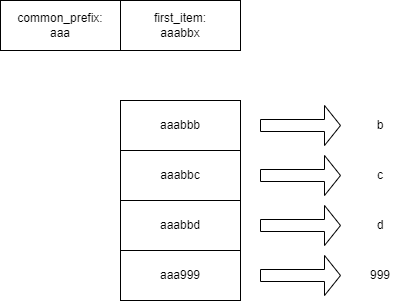
如上图:数据存储上,先计算总体的公共前缀,在计算两两之间的公共前缀,以此来压缩存储空间。
细节请看我之前写的一篇分析文章:《VictoriaMetrics源码阅读:极端吝啬,vm序列化数据到磁盘的细节》
5.3.2 数据part
此处引用胡建洪画的图:
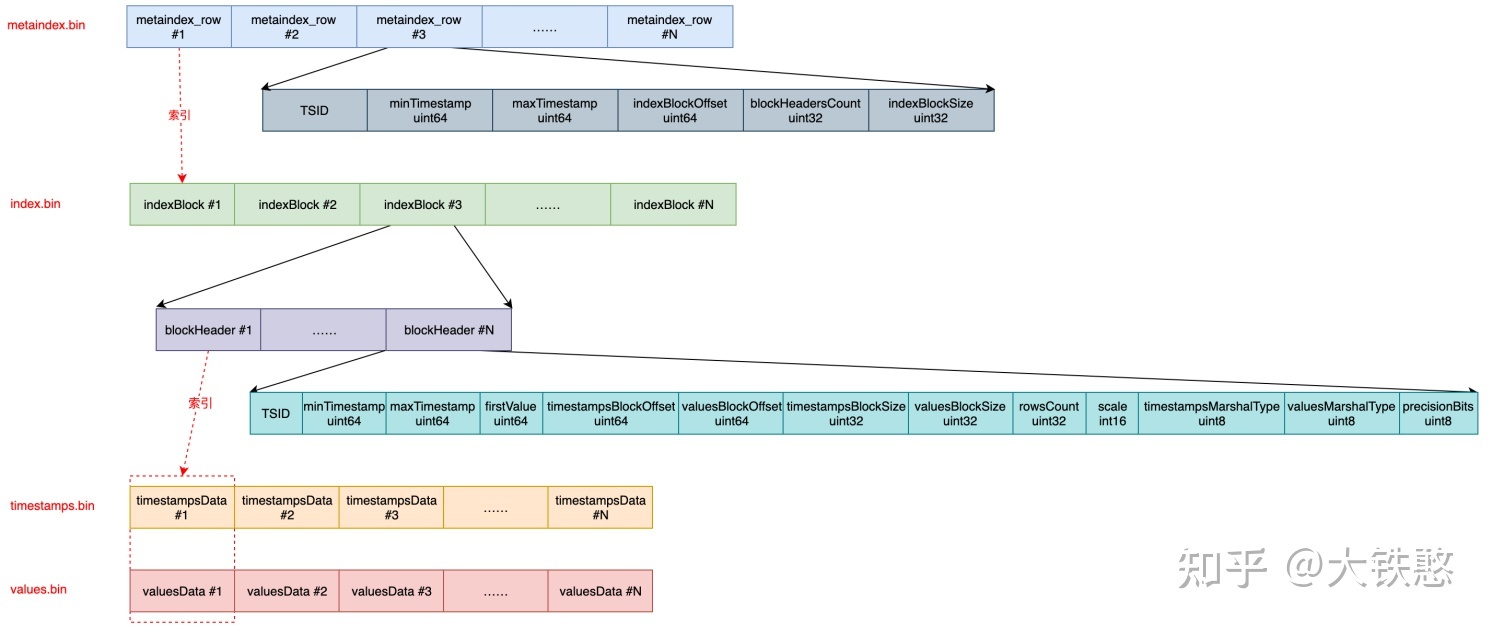
5.3.2.1 metadata.bin文件
与indexdb类似,metadata.bin存储所有indexBlock的元数据信息。
- 整个文件使用ZSTD压缩
- 包含了连续的多条metaindexRow结构
See: VictoriaMetrics-1.72.0-cluster/lib/mergeset/metaindex_row.go:13
- 每个metaindexRow对应着index.bin中的indexBlock
5.3.2.2 index.bin
- 应用内存映射文件的方式来从index.bin获取数据
- 通过metaindexRow中的IndexBlockOffset+IndexBlockSize字段确定在index.bin文件中的位置
- 数据需要先进行ZSTD解压缩
- 之后是连续的多个blockHeader所表示的结构
内容比较长,请见:VictoriaMetrics-1.72.0-cluster/lib/storage/block_header.go:17
- indexBlock内的blockHeader数组会按照tsid进行排序
每个block只存储一个TSID的信息。
5.3.2.3 timestamps.bin和values.bin
这两个文件存储tsid对应的时间戳和value。这两个文件都使用内存映射文件来读取数据。
- 通过blockHeader中的TimestampsBlockOffset+TimestampsBlockSize到timestamps.bin中读取数据
- 根据blockHeader中的TimestampsMarshalType字段来决定如何进行ZSTD解压缩
- 越大的块,压缩比越高
- 很小的块,不压缩
- 根据blockHeader中的TimestampsMarshalType字段来决定如何进行ZSTD解压缩
- 通过blockHeader中的ValuesBlockOffset+ValuesBlockSize到values.bin中读取数据。
- 根据blockHeader中的ValuesMarshalType字段来决定如何进行ZSTD解压缩
- 以上读到的数据通过
nearest delta算法来还原为int64类型的值
数值压缩的算法介绍请看:时间序列压缩算法解释(英文)
5.4 对象结构
5.4.1 索引
索引的对象层次可以表示如下:storage -> indexDB ->table-> partWrapper -> part -> indexBlock -> block -> item
| 对象 | 结构名 | 源码位置 | 备注 |
|---|---|---|---|
| 存储对象 | Storage | VictoriaMetrics-1.72.0-cluster/lib/storage/storage.go:41 | 全局的存储对象 |
| 索引 | indexDB | VictoriaMetrics-1.72.0-cluster/lib/storage/index_db.go:54 | 每个retentionPeriod切换一次。 默认是31天 包含curr和prev两个索引对象 |
| 表 | Table | VictoriaMetrics-1.72.0-cluster/lib/mergeset/table.go:83 | 包含多个part |
| mem table | rawItemsShards | VictoriaMetrics-1.72.0-cluster/lib/mergeset/table.go:128 | 数据先追加到内存表 |
| partWrapper | partWrapper | VictoriaMetrics-1.72.0-cluster/lib/mergeset/table.go:216 | part分为文件part和inmemoryPart两种 |
| inmemoryPart | inmemoryPart | VictoriaMetrics-1.72.0-cluster/lib/mergeset/inmemory_part.go:11 | 内存中的part |
| part | part | VictoriaMetrics-1.72.0-cluster/lib/mergeset/part.go:49 | 包含metaindexRow数组,可以进一步定位到indexBlock |
| indexBlock | indexBlock | VictoriaMetrics-1.72.0-cluster/lib/mergeset/part.go:136 | part中不直接包含indexBlock,而是通过metaindexRow对象来获取 |
| Block | blockHeader | VictoriaMetrics-1.72.0-cluster/lib/mergeset/block_header.go:12 | block的头信息 只是头,没有数据 |
| inmemoryBlock | VictoriaMetrics-1.72.0-cluster/lib/mergeset/encoding.go:61 | 完全加载到内存中的block |
5.4.1.1 table
table对象包含 []*partWrapper 和 rawItemsShards。
- rawItemsShards相当于是用于数据追加的mem table
- []*partWrapper中包含了多个partWrapper,他们都是只读的
- table中的协程包括:
- partMerger
- 用于把part进行不断的merge
- 协程数量为可用CPU核的数量
- 最快1毫秒,最慢1秒,不断进行merge操作
- rawItemsFlusher
- 用于把mem table中的数据转换成inmemoryPart
- 一个协程
- 每秒执行一次
- flushCallback协程
- 执行调用者要求的回调任务(一般用于控制cache版本)
- 1个协程
- 10秒执行一次
- partMerger
5.4.1.2 part
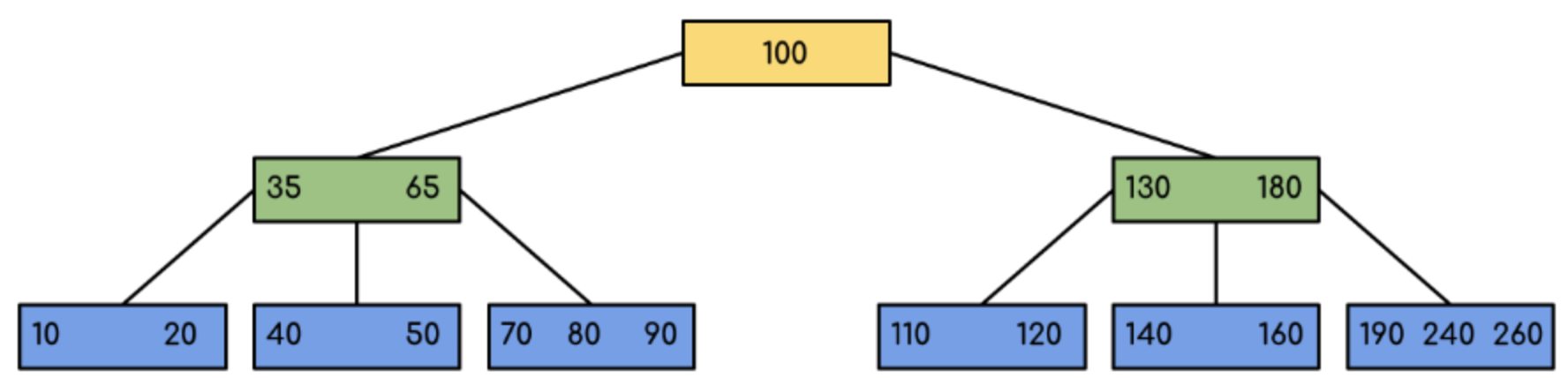
part也可以使用B树的结构来描述:
- part对象的结构为:
see: VictoriaMetrics-1.72.0-cluster/lib/storage/part.go:34
type part struct { // 所有的索引是排序后存储的,每个part对象管理一部分索引
ph partHeader // 头部信息
path string
size uint64
mrs []metaindexRow //这个数组的内容来自对 metaindex.bin文件的解析
// 数组按照 firstItem 来排序,便于做二分查找
indexFile fs.MustReadAtCloser // 三个内存映射文件 index.bin
itemsFile fs.MustReadAtCloser // items.bin
lensFile fs.MustReadAtCloser // lens.bin
idxbCache *indexBlockCache // 从 index.bin中加载的数据,放在cache里面 //两级缓存。这一级缓存indexBlock
ibCache *inmemoryBlockCache // 以偏移量为key // 这一级缓存 block
}
对于文件part,指定part目录后,会加载metadata.json, metaindex.json两个文件。
- partHeader对象记录了整个part的概要信息
- 通过firstItem和lastItem两个字段,可以确定所有数据的起止范围
- see: VictoriaMetrics-1.72.0-cluster/lib/mergeset/part_header.go:15
[]metaindexRow数组记录了part下的所有indexBlock的信息
- []metaindexRow 会按照 firstItem 来排序。
- see: VictoriaMetrics-1.72.0-cluster/lib/storage/metaindex_row.go:15
三个重要的数据文件以内存映射文件的方式打开:
- index.bin: 记录一个indexBlock里面有哪些block
- items.bin: 以block为单位顺序存储,每个block里面有多个索引
- lens.bin: 记录items.bin中的起止位置
- 两级缓存:
- indexBlockCache: 以index.bin中的偏移量为key,缓存对应的block的信息
- inmemoryBlockCache: 以items.bin中的偏移量为key,记录block的完整信息。
- inmemoryBlockCache指向inmemoryBlock对象
- inmemoryBlock在内存中已经是完全可读了(存储格式转换为内存格式)
5.4.1.3 indexBlock
see: VictoriaMetrics-1.72.0-cluster/lib/storage/part.go:140
type indexBlock struct { // 内容来自 index.bin 文件
bhs []blockHeader // 按照 first item排序的数组,可用于二分查找
}
indexBlock包含多个block。
indexBlock中的blockHeader信息是从index.bin中读取得到的。
5.4.1.4 block
一个block即一个 sstable。
see: VictoriaMetrics-1.72.0-cluster/lib/storage/block_header.go:17
- 什么情况下会触发block的加载?
- 写入新的time series数据的时候inmemoryBlock(Add方法),然后转换成只读的inmemoryPart
- 通过Unmarshal方法填充
- merge的时候填充
- partSearch中,查询的时候填充
5.4.2 数据
数据的对象层次可以表示如下:storage -> table-> partitionWrapper -> partition -> part -> partWrapper -> indexBlock -> block -> timestamp&value
| 对象 | 结构名 | 源码位置 | 备注 |
| :--: | :--: | :--- | :--- |
| 存储对象 | Storage | VictoriaMetrics-1.72.0-cluster/lib/storage/storage.go:41 | 全局的存储对象
|
| 表 | Table | VictoriaMetrics-1.72.0-cluster/lib/storage/table.go:19 | 包含多个partitionWrapper |
| Partition的包装 | partitionWrapper | VictoriaMetrics-1.72.0-cluster/lib/storage/table.go:39 | 包含一个partition对象 |
| 分区 | partition | VictoriaMetrics-1.72.0-cluster/lib/storage/partition.go:109 | 包含smallParts和bigParts的数组
包含内存表rawRowsShards |
| 内存表 | rawRowsShards | VictoriaMetrics-1.72.0-cluster/lib/storage/partition.go:442 | 数据会先写入到内存表中 |
| part的包装 | partWrapper | VictoriaMetrics-1.72.0-cluster/lib/storage/partition.go:172 | 包含了part和inmemoryPart。
part分为文件part和内存part |
| part | part | VictoriaMetrics-1.72.0-cluster/lib/storage/part.go:34 | 包含metaindexRow数组,可以进一步定位到indexBlock |
| inmemoryPart | inmemoryPart | VictoriaMetrics-1.72.0-cluster/lib/storage/inmemory_part.go:23 | rawRowsShards的内存表的数据,会转换为inmemoryPart |
| indexBlock | indexBlock | VictoriaMetrics-1.72.0-cluster/lib/storage/part.go:140 | part中不直接包含indexBlock,而是通过metaindexRow对象来获取 |
| Block | blockHeader | VictoriaMetrics-1.72.0-cluster/lib/storage/block_header.go:17 | block的头信息
只是头,没有数据 |
5.4.2.1 table对象
table对象是数据存储部分的顶层对象。
- table对象包含的协程有:
- RetentionWatcher
- 1个协程
- 每分钟执行一次
- 用于把超时所管理时间范围的part进行丢弃
- FinalDedupWatcher
- 1个协程
- 每小时执行一次
- 在所有partition上执行forceMerge
- RetentionWatcher
5.4.2.2 partition对象
- partition对象包含的协程有:
- MergeWorkers
- 开始CPU核数二分之一的协程,用于smallPart的合并
- 开始CPU核数二分之一的协程,用于bigPart的合并
- 合并的间隔时间,最少10毫秒,最多10秒
- RawRowsFlusher
- 一个协程
- 1秒执行一次
- 用于把mem table中的数据转移到inmemoryPart
- InmemoryPartsFlusher
- 一个协程
- 5秒执行一次
- 用于合并smallPart中的inmemoryPart
- StalePartsRemover
- 一个协程
- 7分钟执行一次
- 删除超过管理时间的part
- MergeWorkers
5.4.3 storage对象
storage对象封装索引和数据两部分的顶层对象。
- 包含curr和prev两个indexDB对象,默认支持最多62天的索引查询
- 包含一个数据存储的table对象
- storage对象上的协程:
- CurrHourMetricIDsUpdater
- 每 10 秒,把这一小时的 metricID 写入uint64set
- NextDayMetricIDsUpdater
- 每 11 秒,把这一天的新产生的metricID写入uint64set结构
- RetentionWatcher
- 每31天+4小时切换一个indexdb
- FreeDiskSpaceWatcher
- 每30秒,检查剩余磁盘空间
- CurrHourMetricIDsUpdater
5.5 cache
5.5.1 索引cache
5.5.1.1 part对象上的cache
indexBlockCache
- 以index.bin中偏移量为key
- value为indexBlock对象
会专门开启一个协程来清理过期数据
- 每30秒一次,清理掉120秒未访问的项
- 每120秒一次,清理掉cache miss的统计数据
任何一个key,必须cache miss至少两次才会写入缓存
- 避免非常临时的数据占用缓存空间
inmemoryBlockCache
- 以items.bin中的偏移量为key
- value为inmemoryBlock对象,即全部加载到内存的block
会专门开启一个协程来清理过期数据
- 每30秒一次,清理掉120秒未访问的项
- 每120秒一次,清理掉cache miss的统计数据
任何一个key,必须cache miss至少两次才会写入缓存
5.5.1.2 table对象上的mem table: rawItemsShards
索引会先写入mem table,也算是某种写缓存。
See: VictoriaMetrics-1.72.0-cluster/lib/mergeset/table.go:128
- rawItemsShards使用与可用CPU核数相同的分桶
- 每次写入数据前,先对shardIdx字段原子加,然后取模桶长度来确定分桶
- 理论上每次写入都会跳转到不同的分桶,减少锁竞争
rawItemsShards对象再包含多个rawItemsShard对象
- rawItemsShard对象再包含多个inmemoryBlock对象
- 每个inmemoryBlock最多写入64KB数据,写满后再申请一个inmemoryBlock
- 最多允许512个inmemoryBlock对象,超过这个数量就执行merge流程
- 也就是说,每个rawItemsShard最多缓存32mb数据
- 假设vm-storage配置为16核,mem table的最大容量为32*16=512mb
table对象会创建一个清理mem table的协程
- 每秒执行一次
- 当一个rawItemsShard积累的数据大于等于2秒,进入合并流程
5.5.1.3 indexDB上的cache
这里的cache使用workingsetcache.Cache对象来缓存key-value格式数据。
See: VictoriaMetrics-1.72.0-cluster/lib/workingsetcache/cache.go:25
workingsetcache.Cache又使用了fastcache组件来缓存数据。
关于fastcache组件的细节,请看:《介绍一个golang库:fastcache》
- tagFiltersCache成员
- TagFilters -> TSIDs 的缓存
- 相当于把上次搜索表达式所涉及的metric的tsid缓存下来,如果下次还是同样的表达式就不用再搜索TSID了
- loopsPerDateTagFilterCache成员
- 索引分为日期索引和全局索引。这里的日期索引来加速某一个日期的搜索的场景。搜索不到再退回到全局索引去搜索
- (date, tagFilter) -> loopsCount
- Key: indexDB名称 + 日期 + tagFilter过滤表达式 + accountID + projectID
- Value: loopsCount + filterLoopsCount + currentTimestamp
5.5.2 数据cache
5.5.2.1 part对象上的cache
- indexBlockCache
- See: VictoriaMetrics-1.72.0-cluster/lib/storage/part.go:148
- 以index.bin中偏移量为key
- value为indexBlock对象
- 会专门开启一个协程来清理过期数据
- 每30秒一次,清理掉120秒未访问的项
5.5.2.2 partition对象上的mem table: rawRowsShards对象
数据会先写入mem table。
- rawRowsShards使用与可用CPU核数八分之一的分桶
- eg: vm-storage配置16核的话,有两个分桶
- 每次写入数据前,先对shardIdx字段原子加,然后取模桶长度来确定分桶
- 通过分桶来减少锁竞争
- rawRowsShards对象再包含多个rawRowsShard对象
- rawRowsShard对象包含rawRow结构的数组
- rowRow是要写入的数据的格式,一般是tsid, timestamp, value等字段
- rawRow数组的大小根据用户配置的最大可用内存来决定
- 最少1万条
- 最多50万条
- 配置16核的情况下,可用内存超过13.3GB时,rawRow数组就是50万
- 添加的数据会直接追加到rawRow数组中
- rawRow数组写满后,执行flush操作,然后清空rawRow数组
- rawRowsShard对象包含rawRow结构的数组
- partition对象会创建一个清理mem table的协程
- 每秒执行一次
- 当一个rawRowsShard积累的数据大于等于2秒,进入合并流程
5.5.2.3 没有block cache
通常,TSDB中最常见的查询是获取每个metric最新的数据,因此缓存某个时间段内的数据收益不大。
5.5.3 全局cache
即在Storage对象上的缓存对象。
- workingsetcache.Cache类型的cache
- tsidCache: Metric -> TSID
- 插入新的metric的时候,触发这个cache的更新
- metricIDCache: MetricID -> TSID
- 查询数据的时候,触发更新此cache
- metricNameCache: MetricID -> Metric
- 查询数据的时候,触发更新此cache
- tsidCache: Metric -> TSID
- fast cache类型的cache
- currHourMetricIDs: 记录当前这一小时存在的metricID
- prevHourMetricIDs: 记录前一小时存在的metricID
- nextDayMetricIDs: 记录最近一天的metricID
- deletedMetricIDs: 用户调用删除接口所删除的metricID
- dateMetricIDCache
- 记录某天的所有存在的metricID